Insights from the Frontier of Robotics AI
Engineering perspectives on simulation, synthetic data, imitation learning, and the infrastructure that powers modern robotics.
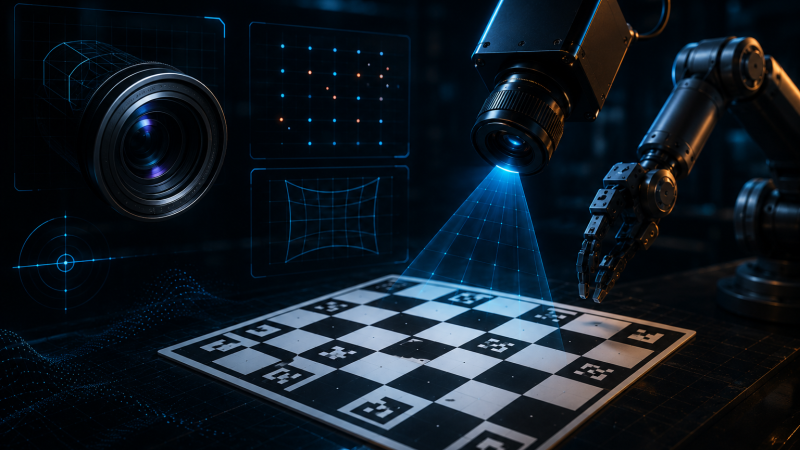
The Calibration Step That Makes or Breaks Your Sim-to-Real Pipeline
Camera calibration computes the intrinsic parameters — focal length, principal point, and distortion coefficients — that describe how your specific camera maps the 3D world...

From Two Hands to Two Robot Arms: Building a Bimanual Data Pipeline in Simulation
Where We Started The Hardware Ceiling We Hit Early Building a robot training pipeline from scratch means confronting the data problem early. For robots to...
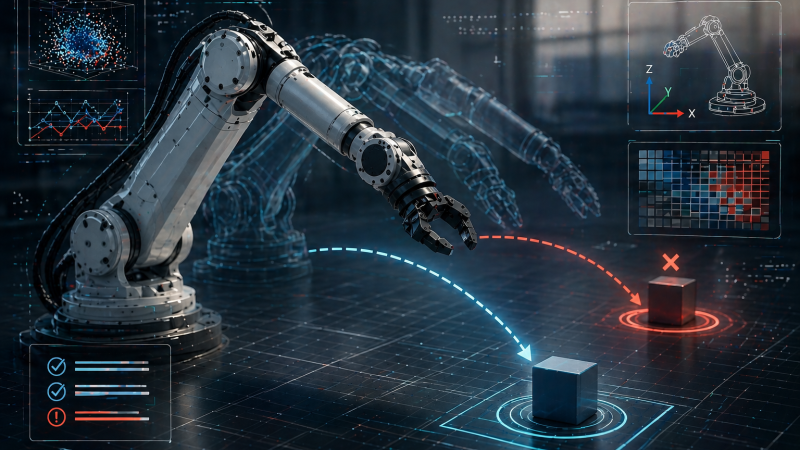
Synthetic Data, Silent Failures: What Sim-to-VLA Conversion Gets Wrong
The robot moved confidently in the wrong direction. Not random noise — that would have been easier to diagnose. The motion had geometric coherence. The...
The Annotation Bottleneck — Failure Modes, Diagnostic Signals, and a Validation Framework
The Problem Nobody Talks About Synthetic data generation pipelines for robot imitation learning have matured fast. Tools like IsaacMimic and SkillGen can take a handful of human demonstrations and...